本实用新型公开了一种复合码垛机器人抓手,具体涉及智能设备技术领域,包括顶架,所述顶架内部沿竖直方向上贯穿设置有下压气缸,所述下压气缸伸缩端固设有固定架,所述固定架下表面两端分别固定安装有一组第一延伸架,所述第一延伸架下方铰接有转动架,所述顶架下方两端位置处分别固定安装有一组第二延伸架,所述第二延伸架下方铰接有爪臂,所述爪臂内侧设置有第一挤压机构。本实用新型通过设置了第一挤压机构和第二挤压机构,分别从物体的上方和两侧对其进行夹持,提供了全方位的紧固作用,保证了物体在抓取时与本实用新型之间的稳固性,避免了再抓取的过程中发生脱落的现象,提高了搬运效率。
技术领域
[0001] 本实用新型涉及智能设备技术领域,更具体地说,本实用新型涉及一种复合码垛机器人抓手。
背景技术
[0002] 码垛机器人,是机械与计算机程序有机结合的产物,为现代生产提供了更高的生产效率,码垛机器在码垛行业有着相当广泛的应用,码垛机器人大大节省了劳动力,节省空间,码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高,码垛机器人系统采用专利技术的坐标式机器人的安装占用空间灵活紧凑,能够在较小的占地面积范围内建造高效节能的全自动砌块成型机生产线的构想变成现实,其中抓手则是码垛机器人上的重要组成部分。
[0003] 经检索,中国实用新型专利公开了一种复合码垛机器人抓手(授权公开号为CN207127907 U),包括架体,栈板抓取装置,罐体抓取装置和隔板抓取装置;所述栈板抓取装置、罐体抓取装置和隔板抓取装置分别安装在架体上;所述架体顶部设有连接法兰,所述架体通过连接法兰连接外设机械手臂。该实用新型结构简单,易于制备。具备多样化的抓取功能,降低流水线的整体复杂程度,且大幅提高搬运箱体的效率。
[0004] 但是其在实际使用时,仍旧存在较多缺点,如抓取的物体与抓手之间没有相对的紧固机构,在移动的过程中,容易发生物体脱落的现象,使用安全性较差,且降低了物体的搬运效率。
实用新型内容
[0005] 为了克服现有技术的上述缺陷,本实用新型的实施例提供一种复合码垛机器人抓手,通过设置了第一挤压机构和第二挤压机构,分别从物体的上方和两侧对其进行夹持,提供了全方位的紧固作用,保证了物体在抓取时与本实用新型之间的稳固性,避免了再抓取的过程中发生脱落的现象,提高了搬运效率。
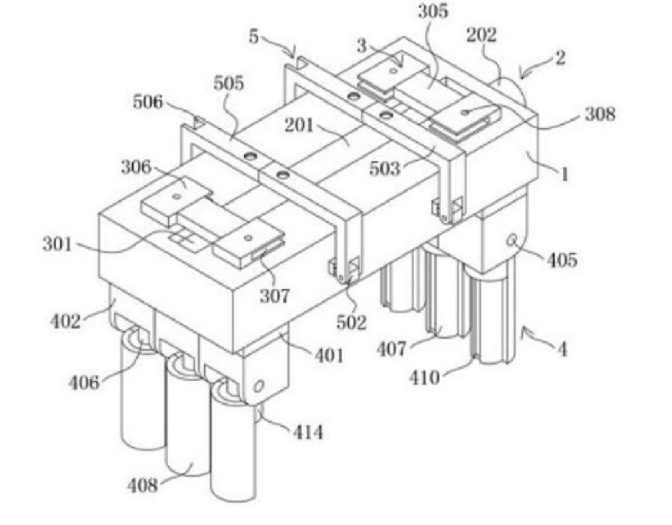
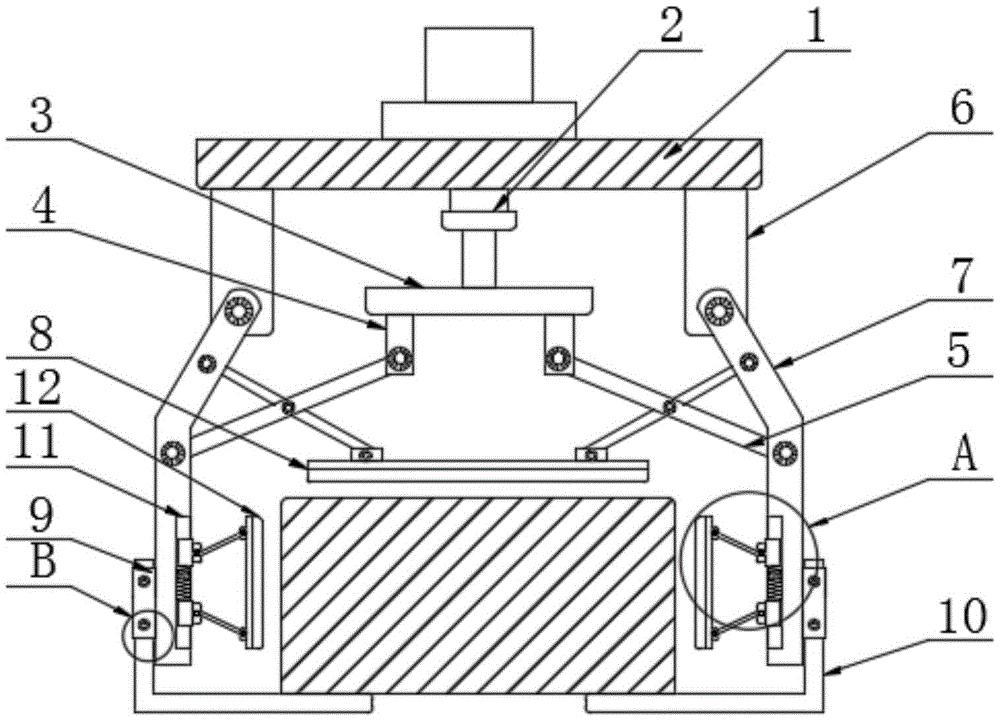
[0006] 为实现上述目的,本实用新型提供如下技术方案:一种复合码垛机器人抓手,包括顶架,所述顶架内部沿竖直方向上贯穿设置有下压气缸,所述下压气缸伸缩端固设有固定架,所述固定架下表面两端分别固定安装有一组第一延伸架,所述第一延伸架下方铰接有转动架,所述顶架下方两端位置处分别固定安装有一组第二延伸架,所述第二延伸架下方铰接有爪臂,所述爪臂内侧设置有第一挤压机构,所述爪臂外侧设置有固定机构,所述固定机构下方设置有抓齿,所述爪臂内表面沿竖直方向上开设有滑槽,所述滑槽一侧设置有第二挤压机构;
[0007] 所述第一挤压机构包括有活动架,所述活动架一端铰接有第一活动板,所述第一活动板下表面粘接有第一缓冲垫;
[0008] 所述第二挤压机构包括有动作弹簧,所述动作弹簧一端固接有第一滑动块,且动作弹簧另一端固接有第二滑动块,所述第一滑动块和第二滑动块侧表面均铰接有一组活动杆,所述活动杆一端铰接有第二活动板,所述第二活动板侧表面粘接有第二缓冲垫。
[0009] 在一个优选地实施方式中,所述固定机构包括有固定块,所述固定块内部开设有第一安装孔,且固定块内部靠近第一安装孔下方位置处开设有第二安装孔,所述固定块一侧贯穿安装有两组固定杆,所述固定杆外部转动套接有定位螺母。
[0010] 在一个优选地实施方式中,所述活动架一端与爪臂相连接,所述活动架与转动架的连接处设置有转动轴,所述活动架的数量共设置有两组。
[0011] 在一个优选地实施方式中,所述第一延伸架与爪臂通过转动架相连接,所述转动架两端均嵌入设置有转动销轴。
[0012] 在一个优选地实施方式中,所述第一滑动块和第二滑动块均与滑槽通过滑动方式相连接,且第一滑动块和第二滑动块与第二活动板通过活动杆相连接。
[0013] 在一个优选地实施方式中,所述第一滑动块和第二滑动块通过动作弹簧相连接。
[0014] 在一个优选地实施方式中,所述顶架与第二延伸架固定连接在一起。
[0015] 在一个优选地实施方式中,所述固定块的数量与抓齿的数量相匹配,所述固定块内部沿竖直方向上开设有贯穿孔。
[0016] 在一个优选地实施方式中,所述抓齿侧表面开设有两组定位孔,且抓齿呈L形结构。
[0017] 本实用新型的技术效果和优点:
[0018] 1、本实用新型中通过设置了第一挤压机构和第二挤压机构,分别从物体的上方和两侧对其进行夹持,提供了全方位的紧固作用,保证了物体在抓取时与本实用新型之间的稳固性,避免了再抓取的过程中发生脱落的现象,提高了搬运效率;
[0019] 2、本实用新型中通过设置了固定机构,能够快速的将多组抓齿进行固定和拆卸,不需要使用多组固定螺母进行紧固,降低了工作人员安装和拆卸过程中的工作量,提供了较高的操作便捷性。