随着社会的快速发展与人们生活水平的日渐提升,许多方面都会用到自动化,尤其是在涉及到一些搬运、运输等方面相关的。上海堃泽机器人科技有限公司是一家专业生产、销售一些自动化机器设备的公司,尤其是搬运机器人方面,公司多种自动化设备数年来被月累越多的客户选择。那有人会好奇公司缸盖重力取件搬运机器人工作原理是什么呢?

1、通过检测吸盘或机械手末端夹具和平衡气缸内气体压力,能自动识别机械手臂上有无载荷,并经气动逻辑控制回路自动调整平衡气缸内的气压,达到自动平衡的目的。
2、工作时,重物犹如悬浮在空中,可避免产品对接时的碰撞,智能机械。
3、在机械手臂的工作范围内,操作人员可将其前后左右上下轻松移动到任何位置,人员本身可轻松操作。同时,气动回路还有防止误操作掉物和失压保护等连锁保护功能zy18。
4、非常重要的一点是,气动平衡吊整机无须电控系统,只需压缩空气和真空源(视工作情况)即可工作,非常方便。
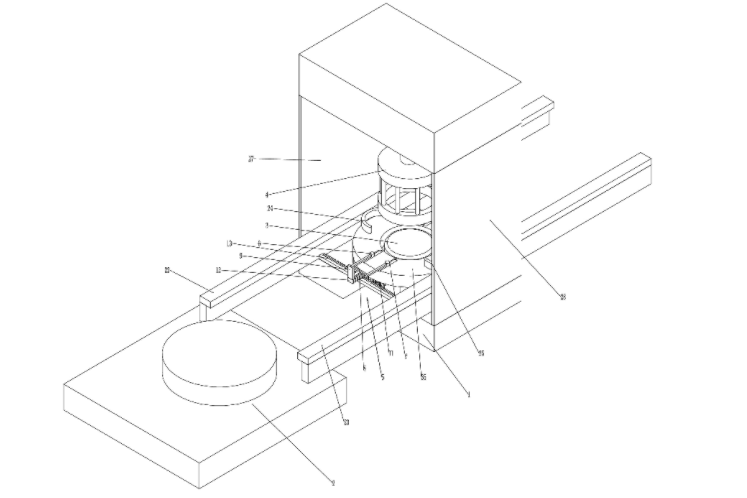
 机器人搬运的设计原理:机器人的手部、腕部、臂部、腰部在内的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。
机器人搬运的设计原理:机器人的手部、腕部、臂部、腰部在内的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。
扭力机械手在操作人员的轻松操作下,可完成复杂的自动机器人的许多工作,而生产及使用成本却大大低于自动机器人,同时使用范围较之自动机器人更为广泛,灵活性和机动性更大。
以上是上海堃泽机器人科技有限公司关于缸盖重力取件搬运机器人工作原理方面相关的一些介绍,如果您想要了解更多相关内容,或者想要咨询服务,可拨打下方联系方式:17191387254