摘要:
本发明提供了一种自动化搬运机器人,包括安装座,旋转及行走机构连接在安装座下端,用于控制安装座旋转及行走,升降座安装在安装座上端,升降座上端安装机械臂,抓取装置连接在机械臂上。控制器分别与旋转及行走机构、升降座、抓取装置、机械臂、电源电连接。
技术领域:
本发明涉及机器人技术领域,特别涉及一种自动化搬运机器人。
背景技术:
随着物流行业及机器智能化的迅猛发展,现在对物流中货箱的搬运及存取的效率越来越高。比如现有企业(如电商)的仓库中搬运货箱时,为了节省人工搬运成本,以及大大提高搬运的效率。现在很多企业的仓库在对货箱进行搬运时已经采用了智能化机器人,但是现有搬运机器人通常尺寸固定,如机器人整体高度固定,不方便在不同搬运空间内使用机器人,以及抓取装置尺寸固定,有时候需要整个更换抓取装置才能抓取不同物体,影响搬运机器人的适应性,以上使得现有搬运机器人使用不方便。
发明内容:
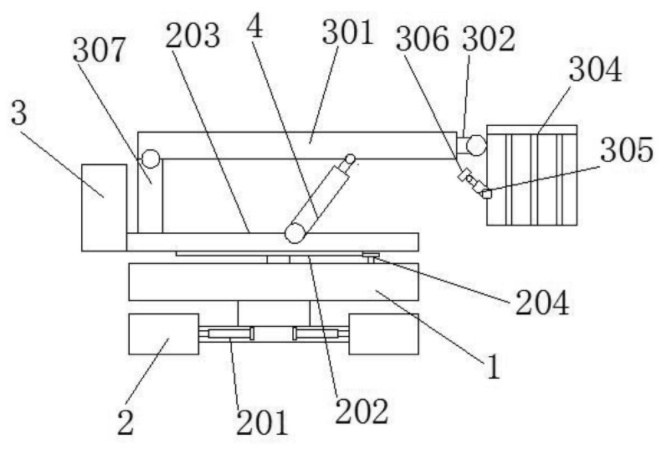
一种自动化搬运机器人包括安装座、旋转及行走机构,连接在所述安装座下端,用于控制安装座旋转及行走,升降座安装在所述安装座上端,升降座上端安装机械臂,抓取装置,连接在所述机械臂上控制器。控制器分别与旋转及行走机构、升降座、抓取装置、机械臂、电源电连接。升降座包括,第一支撑板所述机械臂安装在第一支撑板上端,若干第一连接杆,间隔分布在安装座上端,第一连接杆下端与安装座上端铰接,若干第二连接杆,间隔分布在第一支撑板下端,若干第二连接杆与若干第一连接杆一一对应,第二连接杆上端与第一支撑板下端铰接第一连接块。
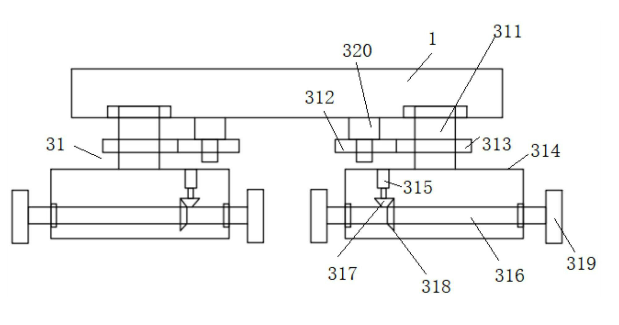
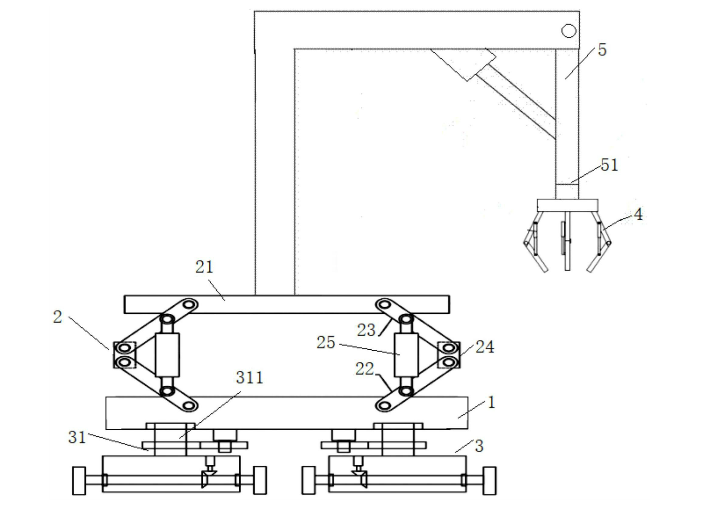
第一连接杆上端与第一连接块下部铰接,第二连接杆下端与第一连接块上部铰接,若干第一电动缸,第一电动缸连接在第一连接杆和第二连接杆之间,第一电动缸固定端和伸缩端分别与第一连接杆和第二连接杆固定连接。第一电动缸与控制器电连接。铰接为通过球铰铰接。旋转及行走机构包括若干行走小组,若干行走小组沿安装座下端周向间隔分布,行走小组包括竖直连接杆,竖直连接杆上端与安装座下端转动连接。
本发明通过设置旋转及行走机构,用于控制安装座旋转及行走,便于实现机器人的行走以及旋转转向,使得机器人运动灵活,便于机器人灵活使用,设置升降座,便于调整机械臂的高度,以便于机器人躲避障碍物,且便于机器人在不同的安装空间内使用,从而便于机器人灵活使用。