在工业4.0时代,国家智能制造高速发展,传统的编程来执行某一动作的机器人已经难以满足现今的自动化需求。在很多应用场景下,需要为工业机器人安装一双眼睛,即机器人视觉成像感知系统,使机器人具备识别、分析、处理等更高级的功能,可以正确对目标场景的状态进行判断与分析,做到灵活地自行解决发生的问题。

从视觉软件进入机器视觉行业,有必要全局认识一下机器视觉系统组成,典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分。一个完整的机器视觉系统的主要工作过程如下:
1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。
2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。
3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。
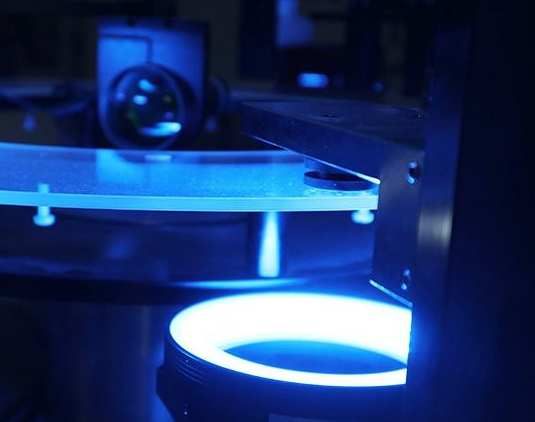
4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。
5、另一个启动脉冲打开灯光照明,灯光的开启时间应该与摄像机的曝光时间匹配。
6、摄像机曝光后,正式开始一帧图像的扫描和输出。
7、图像采集部分接收模拟视频信号通过A/D将其数字化,或者是直接接收摄像机数字化后的数字视频数据。
8、图像采集部分将数字图像存放在处理器或计算机的内存中。
9、处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。
10、处理结果控制流水线的动作、进行定位、纠正运动的误差等。
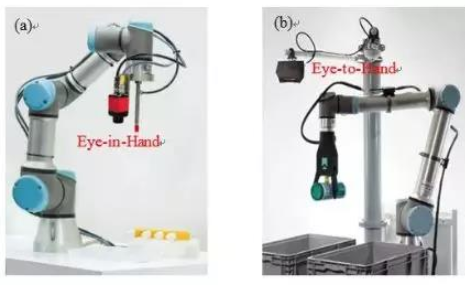
 机器人视觉系统的主要功能是模拟人眼视觉成像与人脑智能判断和决策功能,采用图像传感技术获取目标对象的信息,通过对图像信息提取、处理并理解,最终用于机器人系统对目标实施测量、检测、识别与定位等任务,或用于机械人自身的伺服控制。
机器人视觉系统的主要功能是模拟人眼视觉成像与人脑智能判断和决策功能,采用图像传感技术获取目标对象的信息,通过对图像信息提取、处理并理解,最终用于机器人系统对目标实施测量、检测、识别与定位等任务,或用于机械人自身的伺服控制。
(文章来源于机器人在线网)