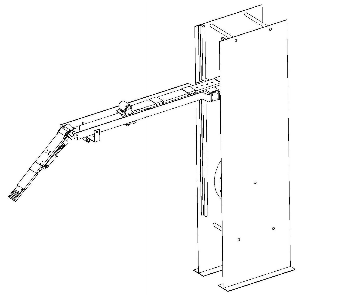
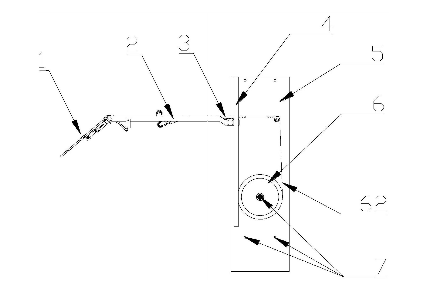
本发明公开了某种复合套管电容屏柔性自动化缠绕机器人,包括送料机械臂、连接板、横向输送机械臂、导轨、支架板、料盘、支架板固定杆,所述导轨数量为两个,两个所述导轨分别固定在两个支架板内侧,两个所述支架板之间通过若干个支架板固定杆连接,所述料盘通过支架板固定杆与支架板连接。本发明工艺质量高,复合套管芯棒的缠绕工作受传统人工缠绕方式的影响,其工艺质量因不同人员的技术水平不同而导致工艺质量参差不齐,本发明的复合套管电容屏的柔性自动化缠绕机器人在缠绕过程中进行套管的数据实时采集,对缠绕执行数据进行测绘和后处理的闭环控制,大幅提升半导电带缠绕的工艺质量和缠绕稳定性。适用于复合套管电容屏的缠绕。
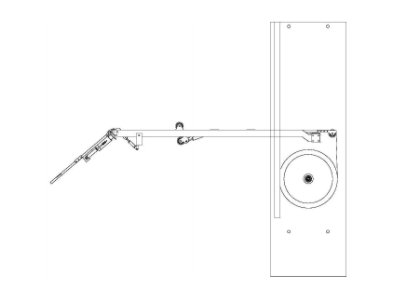
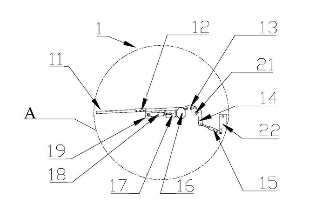
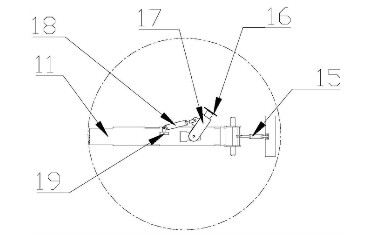
2.根据权利要求1所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述送料机械臂(1)包括送料臂探杆(11)、送料臂带箍(12)、切割罩(13)、拐臂(14)、气缸二(15)、八角刀片(16)、切割电机(17)、气缸一(18)和气缸固定块一(19),所述送料臂探杆(11)与送料臂带箍(12)和切割罩(13)连接,所述气缸一(18)通过气缸固定块一(19)与送料臂探杆(11)连接,所述八角刀片(16)设置在切割电机(17)上,所述切割电机(17)一端与气缸一(18)一端连接,所述气缸二(15)一端与拐臂(14)连接,所述拐臂(14)通过连接板固定杆(21)与切割罩(13)连接。
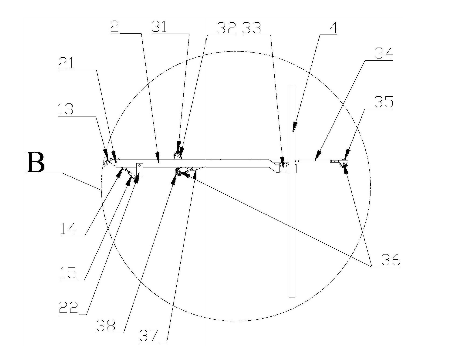
3.根据权利要求1所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述连接板(2)包括连接板固定杆(21)、气缸二固定板(22)。
4.根据权利要求3所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述连接板(2)通过拐臂(14)和气缸二(15)与送料机械臂(1)连接。
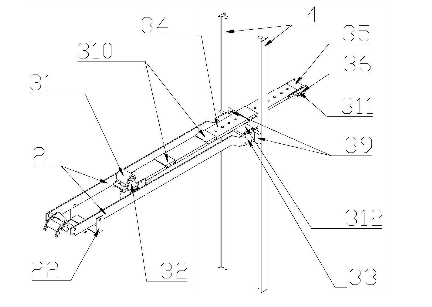
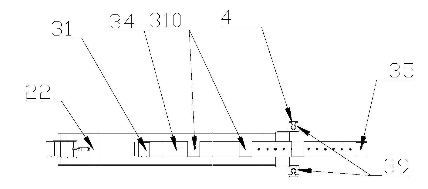
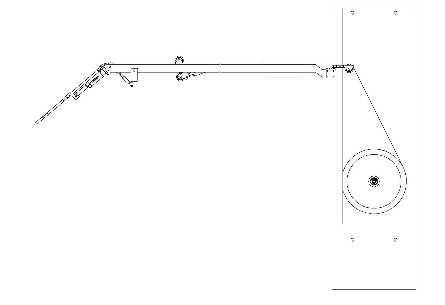
5.根据权利要求1所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述横向输送机械臂(3)包括上张紧轮(31)、上张紧轮连接架(32)、滑块连接板(33)、横向导轨(34)、导向轮(35)、滑轮固定杆(36)、气缸三(37)、下张紧轮(38)、纵向滑块(39)、横向输送机械臂带箍(310)、导向轮连接架(311)和横向滑块(312),所述上张紧轮(31)通过上张紧轮连接架(32)与连接板(2)连接,所述下张紧轮(38)通过滑轮固定杆(36)与气缸三(37)连接,所述横向输送机械臂带箍(310)安装在横向导轨(34)上,所述导向轮(35)通过滑轮固定杆(36)与导向轮连接架(311)固定,所述导向轮连接架(311)与横向导轨(34)固定,所述滑块连接板(33)通过横向滑块(312)与横向导轨(34)连接。
6.根据权利要求5所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述气缸三(37)另一端与连接板(2)连接,所述纵向滑块(39)通过滑块连接板(33)与连接板(2)固定连接,所述横向导轨(34)与连接板(2)通过横向滑块(312)连接。
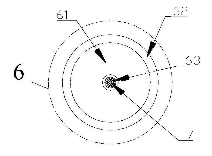
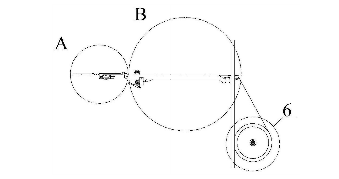
7.根据权利要求1所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述料盘(6)包括料盘主体(61)、半导电带(62)和单向轴承(63),所述半导电带(62)缠绕在料盘主体(61)上,所述单向轴承(63)与料盘主体(61)连接,所述单向轴承(63)通过支架板固定杆(7)与两侧的支架板(5)固定连接。
8.根据权利要求7所述的某种复合套管电容屏柔性自动化缠绕机器人,其特征在于所述单向轴承(63)通过支架板固定杆(7)与两侧的支架板(5)固定连接。