本实用新型涉及智能自动化领域,特别涉及某种智能自动化玻璃搬运机械臂。纵向电机安装在底座上,且转轴竖直向上连接有臂杆横向电机连接在臂杆顶端,且该横向电机的转轴横向连接有连接杆在连接杆的末端连接有支架,在该支架上设置有多个玻璃吸盘还包括有安装横向电机的横向电机座,该横向电机座铰接在臂杆的顶部,在臂杆上设置有动作气缸,该动作气缸的伸缩杆与横向电机座连接在底座的内部设置有与纵向电机、横向电机以及动作气缸连接的控制器。本实用新型的智能自动化玻璃搬运机械臂,通过底座、纵向电机、横向电机以及吸附装置等的配合,能够方便地将玻璃吸附并进行搬运,不仅节约了人工,提高了效率,而且具有结构简单、使用方便的特点。
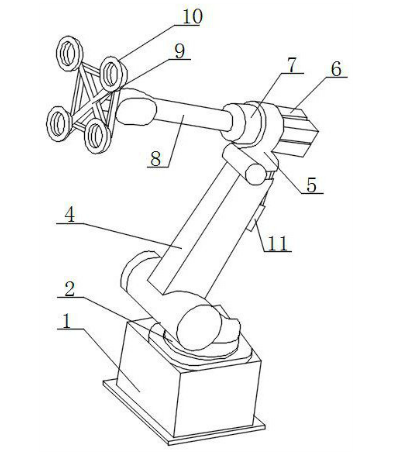
2.根据权利要求1所述的智能自动化玻璃搬运机械臂,其特征在于,在所述的横向电机座5上还安装有与控制器连接的真空泵6,该真空泵6与所述的玻璃吸盘10配合。
3.根据权利要求2所述的智能自动化玻璃搬运机械臂,其特征在于,每个所述的玻璃吸盘10,对应一个真空泵6。
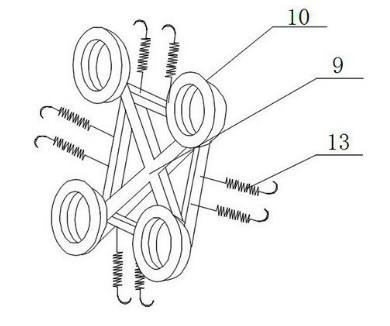
4.根据权利要求1所述的智能自动化玻璃搬运机械臂,其特征在于,在所述的支架9的四个外部均设置有保护玻璃的辅助抓取装置。
5.根据权利要求4所述的智能自动化玻璃搬运机械臂,其特征在于,所述的辅助抓取装置包括连接在支架9上的弹簧13,在该弹簧13的末端连接有抓取玻璃的抓取钩。
6.根据权利要求5所述的智能自动化玻璃搬运机械臂,其特征在于,所述的抓取钩的钩尖钝化设置。
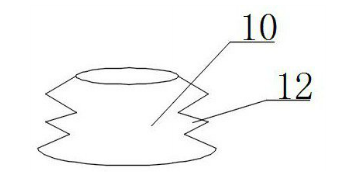
7.根据权利要求1所述的智能自动化玻璃搬运机械臂,其特征在于,所述的玻璃吸盘10的外部具有褶皱12。