软体机器人具有内在的安全性,高度的弹性,并且价格非常便宜,这使它们有广泛的应用前景。但是相对于机器人技术的其他领域,软体机器人的开发速度有些慢,部分是因为软机器人无法直接受益于我们在过去几十年中看到的计算能力,以及传感器和执行器可用性的大幅增长。取而代之的是,机器人专家必须发挥创造力,以找到使用软材料和兼容电源实现常规机器人组件功能的方法。在最近一期《科学机器人》中,来自圣地亚哥大学的研究人员展示了一种具有四只腿的柔软步行机器人,该机器人的脚步像乌龟一样步态,由管子和阀门制成的气动回路系统控制着步态。这种由空气驱动的神经系统可以从单个压缩空气源按顺序启动多个自由度,从而大大降低了复杂性,并为机器人本身带来了非常基本的决策形式。

气动步行机器人的俯视图
一般来说,当人们谈论软机器人时,机器人只是大部分是软的。有一些部件是很难做软的,包括压力源和必要的电子元件。这款机器人真正酷的地方在于,研究人员已经成功地将压力源(可以是单根系绳,也可以是车载二氧化碳滤芯)引导到四个不同的腿上,每个腿上有三个不同的气室,使用完全由软性材料制成的振荡三阀电路。其灵感可以从生物学中找到,包括四足动物在内的自然生物利用称为中枢模式发生器(CPG)的神经系统组件来提示四肢重复运动,这些四肢用于行走、飞行和游泳。这在某些生物中显然比在其他生物中更为复杂,并且通常由感觉反馈来介导,但是CPG的基础结构基本上只是一个重复回路,该回路依次驱动肌肉以产生稳定,连续的步态。在这种情况下,我们需要以成对的方式驱动气动肌肉,从而产生对角对联步态,其中对角相对的四肢同时向前和向后旋转。
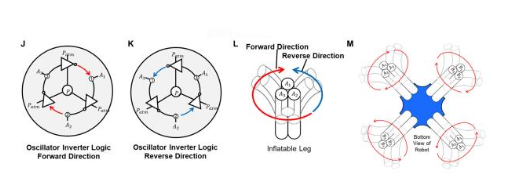
回路本身由三个通过管道连接的双稳态气动阀组成,通过为流经其中的气体提供阻力,可通过改变管的长度和内径来调节阻力,从而起到延迟的作用。在回路内,加压气体的运动既是能量的来源,又是信号的来源,因为回路中的压力无论在哪里,都是腿在移动。最简单的电路仅使用三个阀,并且可以使机器人沿一个方向行走,但是更多的阀可以添加更复杂的腿部控制选项。例如,研究人员能够使用七个阀门来调整步态的相位偏移,甚至只有一个额外的阀门(尽管设计稍微复杂一些)也可以使系统反转,从而导致机器人在响应时向后走从软传感器输入。
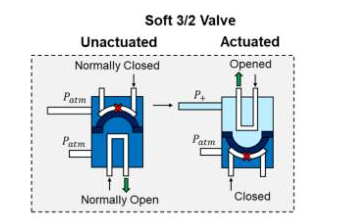
通过将常闭半部(顶部)切换为常开,将常开半部(底部)切换为常闭,每个阀都充当逆变器
这项工作与JPL正在开发的探索金星的漫游车有一些相似之处。当然,那个漫游车并不是一个软机器人,但它的运作受到类似的限制,因为它不能依靠传统的电子系统进行自主导航或控制。事实证明,有很多巧妙的方法来使用机械智能来制造具有相对复杂的自主行为的机器人,这意味着在未来,软体机器人可以在使用非合规系统不是一个好的选择的情况下找到有价值的作用。在最高层次上,机器人技术的基本假设之一是在关节处连接了刚体,并且所有运动都发生在这些关节处。坦率地说,这是一种非常不错的方法,因为它使数学变得容易,并且简化了控制。但是,当你在大自然中环顾四周时,即使动物确实有骨头和关节,我们与世界互动的方式也比简单的故事要复杂得多。如果需要在非常未知的环境中运行机器人,可以内置一些智能方法,这也是这项工作真正属于的范畴。
在狭小空间中行走就是一个很好的例子。如果是刚性腿的机器人,你必须完全改变腿部的移动方式才能在狭小空间中行走。而如果你有灵活的腿,就像这篇论文中的机器人一样,你可以使用相对简单的控制策略来挤过一个刚性系统无法通过的区域。使用软机器人的机会之一是,只要符合材料要求,就可以存储能量。柔软的身体在快速运动方面具有令人兴奋的潜力,它可以同时利用化学源提供的动力,但是你也可以使用相对较弱的肌肉,该肌肉随着时间的流逝会在柔软的体内存储能量,然后释放能量。
来源:贤集网



