本发明公开某种座盆冲压件生产自动化工作站,包括压力机、导轨和搬运机器人,所述压力机设有六组,所述搬运机器人设有六组,所述导轨位于压力机的一侧位置处,所述搬运机器人活动安装于所述导轨上,所述导轨的一端位置处设有进料装置,且进料装置与第一组所述压力机连接,所述导轨的另一侧的位置处设有成品传输带,本发明通过六组压力机和六组搬运机器人相配合,使用搬运机器人代替人工作业,搬运工件至六组压力机多工序加工,无需冲床操作人员,且配可以自动收纳第一步、第三步和第四部冲压工序产生的废料,无需收纳人员,同时搬运机器人最后将成品搬运至成品传输带,完成整个加工过程,全程自动化操控,加工效率更高。
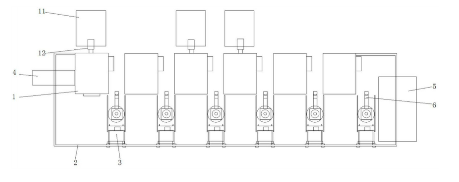
2.根据权利要求1所述的某种座盆冲压件生产自动化工作站,其特征在于第一组所述压力机(1)、第三组所述压力机(1)和第四组所述压力机(1)的后方位置处均设有废料筐(11),且第一组所述压力机(1)、第三组所述压力机(1)和第四组所述压力机(1)与三组所述废料筐(11)之间分别设有废料传输带(12)。
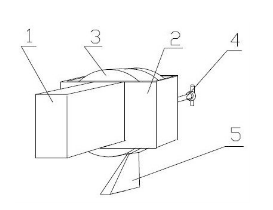
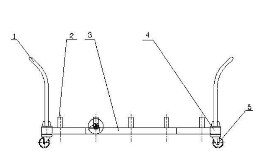
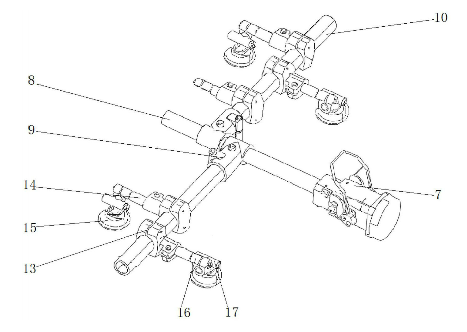
3.根据权利要求1所述的某种座盆冲压件生产自动化工作站,其特征在于所述搬运主杆(8)侧壁上至少设有两组三通套管(9),且两组所述三通套管(9)相对的一侧均安装有搬运副杆(10),所述搬运副杆(10)侧壁上至少安装有两组朝向相反的抓取组件。
4.根据权利要求1所述的某种座盆冲压件生产自动化工作站,其特征在于所述抓取组件包括固定套件(13)和抓杆(14),所述固定套件(13)与搬运副杆(10)套设安装,且固定套件(13)的一端安装有抓杆(14),所述抓杆(14)上通过角度组件安装有真空吸盘(15)。
5.根据权利要求4所述的某种座盆冲压件生产自动化工作站,其特征在于所述角度组件包括螺母套管(16)与安装管(17),所述螺母套管(16)套设于所述抓杆(14)上,且螺母套管(16)的一侧通过螺孔安装有安装管(17),所述真空吸盘(15)安装于所述安装管(17)的下方。