本发明提供某种具有调节功能的安全性转接机械手,涉及机械手技术领域,解决了不能够通过结构上的改进在实现物料位置转换的同时联动实现物料的夹持以及松开;不能够通过结构上的改进实现物料位移的过程中自动实现螺栓的松动检测的问题。一种自动化具有调节功能的安全性转接机械手,包括滑动座结构;所述滑动座结构上滑动连接有夹持结构,且滑动座结构上安装有调整结构。通过受力块与辅助块的配合,因挤压块A和挤压块B大小相同,且挤压块A和挤压块B呈镜像状焊接,并且当滑动臂向右滑动5cm时受力块与挤压块A接触,从而通过受力块与挤压块A以及挤压块B的接触可实现夹持臂B的夹持和松开,从而节省了一个电动元件。
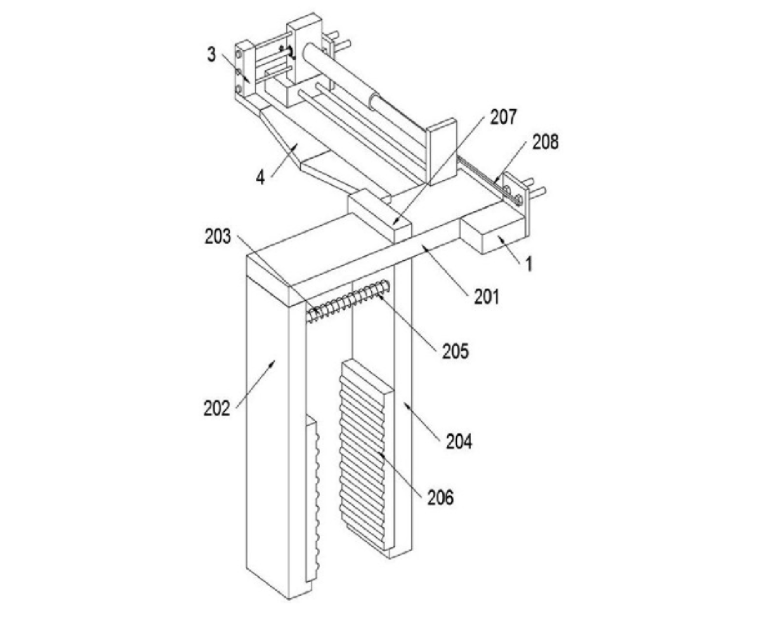
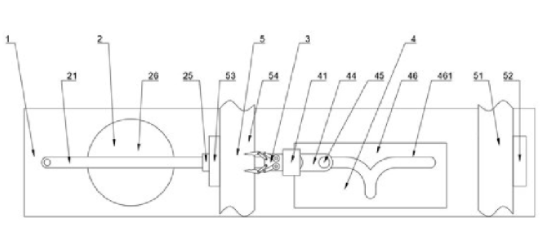
1.某种具有调节功能的安全性转接机械手,其特征在于:包括滑动座结构(1); 所述滑动座结构(1)上滑动连接有夹持结构(2),且滑动座结构(1)上安装有调整结构(3); 调整结构(3)上焊接有辅助块(4);所述夹持结构(2)包括受力块(207),所述受力块(207)通过螺栓固定连接在夹持臂B(204)上,且受力块(207)为L状结构;所述辅助块(4)包括挤压块A(401)和挤压块B(402),所述辅助块(4)由挤压块A(401)和挤压块B(402)焊接而成,且挤压块A(401)和挤压块B(402)均为梯形结构;挤压块A(401)和挤压块B(402)大小相同,且挤压块A(401)和挤压块B(402)呈镜像状焊接,并且当滑动臂(201)向右滑动5cm时受力块(207)与挤压块A(401)接触。

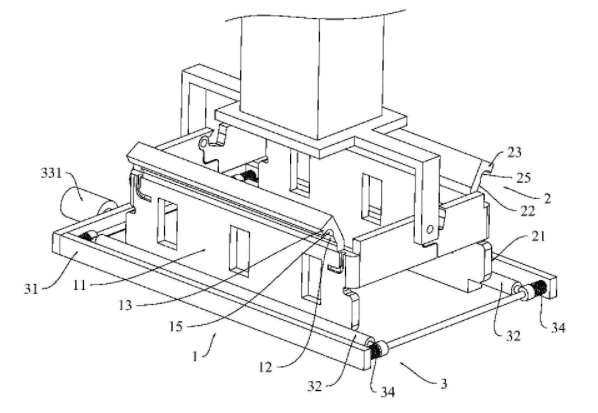
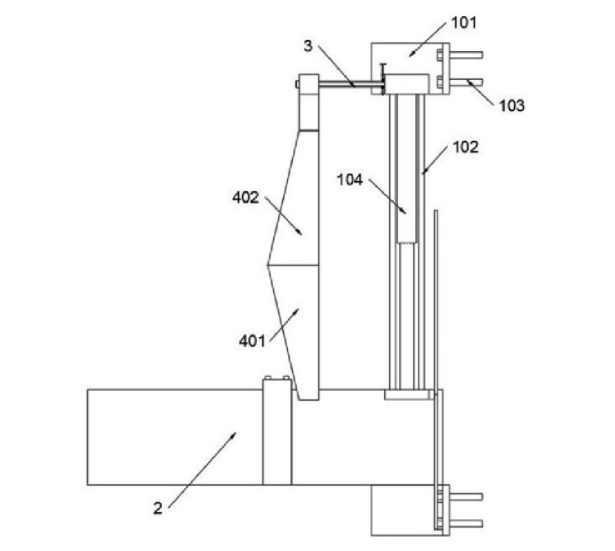
2.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述滑动座结构(1)包括固定座(101)、滑动杆A(102)和固定螺栓(103),所述固定座(101)共设有两个,且两个固定座(101)通过两根滑动杆A(102)焊接相连,并且两根滑动杆A(102)均为圆柱杆状结构;每个固定座(101)上均插接有一个固定螺栓(103),且四个固定螺栓(103)均与机械架螺纹连接。
3.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:滑动座结构(1)还包括电动伸缩杆(104),所述电动伸缩杆(104)尾端与左侧一个固定座(101)固定连接,且电动伸缩杆(104)的头端与滑动臂(201)固定连接,并且电动伸缩杆(104)组成了滑动臂(201)的驱动结构。

4.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述夹持结构(2)包括滑动臂(201)、夹持臂A(202)、滑动杆B(203)、夹持臂B(204)和弹性件(205),所述滑动臂(201)滑动连接在两根滑动杆A(102)上,且滑动臂(201)上焊接有夹持臂A(202);夹持臂A(202)上焊接有两根滑动杆B(203),且两根滑动杆B(203)向上滑动连接有夹持臂B(204);两根滑动杆B(203)上均套接有一个弹性件(205),且两个弹性件(205)共同组成了夹持臂B(204)的弹性伸展结构。
5.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述夹持结构(2)还包括夹持块(206),所述夹持块(206)共设有两个,且两个夹持块(206)分别固定在夹持臂A(202)和滑动杆B(203)上,并且夹持臂A(202)和滑动杆B(203)均为L状结构。
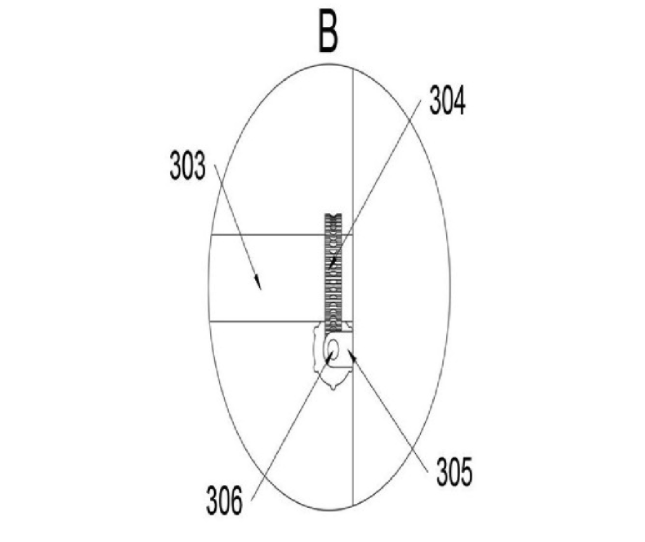
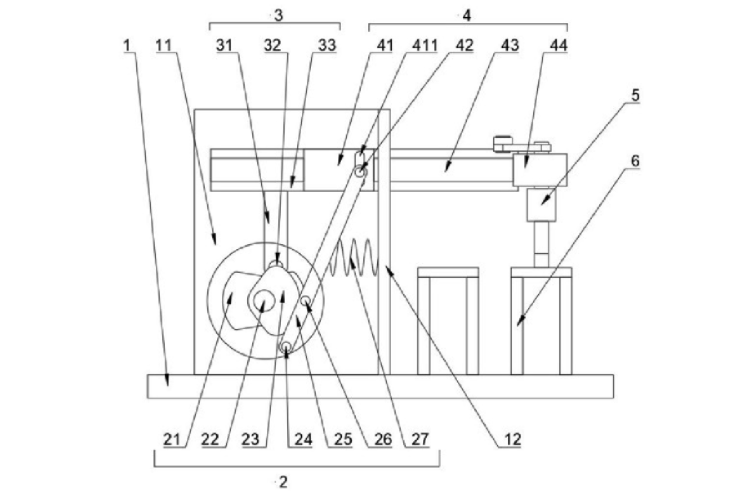
6.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述调整结构(3)包括滑动杆C(301)、滑动块(302)和螺纹杆(303),所述滑动杆C(301)共设有两根,且两根均焊接在固定座(101)上,并且两根滑动杆C(301)上滑动连接有滑动块(302);固定座(101)上转动连接有螺纹杆(303),且螺纹杆(303)与滑动块(302)螺纹连接,并且螺纹杆(303)组成了滑动块(302)的螺纹式调节结构。
7.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述调整结构(3)还包括齿轮(304)、转动座(305)和调整杆(306),所述齿轮(304)焊接在螺纹杆(303)上;所述转动座(305)焊接连接在固定座(101)上,且转动座(305)上转动连接有调整杆(306),并且调整杆(306)上开设有螺旋齿;调整杆(306)上开设的螺旋齿与齿轮(304)啮合,且调整杆(306)与齿轮(304)共同组成了螺纹杆(303)的调节结构以及自锁结构。
8.如权利要求1所述某种具有调节功能的安全性转接机械手,其特征在于:所述夹持结构(2)还包括检测杆(208),所述检测杆(208)焊接在滑动臂(201)上,且检测杆(208)为矩形杆状结构,并且当滑动臂(201)向右移动50cm时检测杆(208)头端与右侧两个固定螺栓(103)接触,当滑动臂(201)向左移动50cm时检测杆(208)尾端与左侧两个固定螺栓(103)接触。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!