本发明公开了某种基于视觉检测功能的设备内部清洁机器人,包括机身,所述机身的内部固定安装有控制部和两个载重部,且两个载重部对称分布于控制部的两端,每个所述载重部与控制部之间均固定连接有万向轴,所述机身的两端对称设置有清洁机构,且两个清洁机构与位置相对应的载重部之间均密封连接有供液装置。本发明中的机器人针对设备内的管道进行设计,能利用高压水流将管道内的脏污进行彻底的清洁;机器人的抓壁能力更强,不会因为水流的反作用力出现晃动或移位;机器人不依赖于复杂的程序也能自动过弯,克服了传统机器人在交叉的管路之间无法定向转弯的缺点。
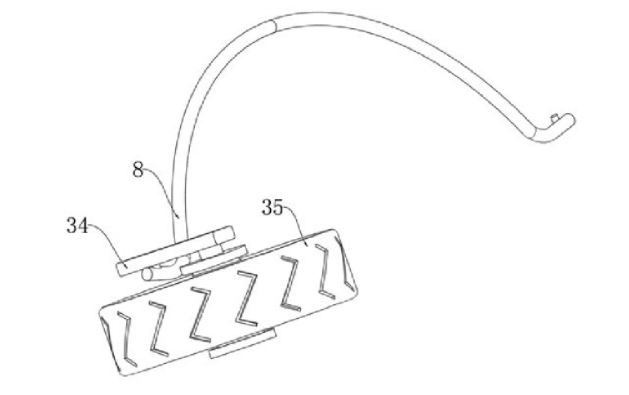
1.某种基于视觉检测功能的设备内部清洁机器人,包括机身(1),其特征在于,所述机身(1)的内部固定安装有控制部(10)和两个载重部(9),且两个载重部(9)对称分布于控制部(10)的两端,每个所述载重部(9)与控制部(10)之间均固定连接有万向轴(11),所述机身(1)的两端对称设置有清洁机构,且两个清洁机构与位置相对应的载重部(9)之间均密封连接有供液装置,所述机身(1)上对称设置有多个固定座(27),且每个固定座(27)均固定连接有行走机构,每个所述行走机构均包括伸缩杆(28)和两个转向装置,每个所述转向装置均包括滑动套(33),每个所述滑动套(33)内均滑动设置有滑杆(34),位于同一个行走机构内的两根滑杆(34)与伸缩杆(28)之间固定连接有弹性杆(8),且每根弹性杆(8)均不与对应的滑动套(33)相接触,每根所述弹性杆(8)均为中空结构,且其内部充有电流变液。
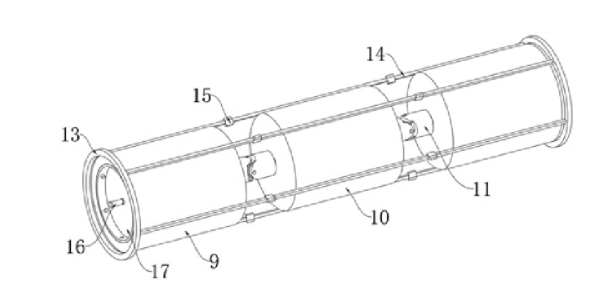
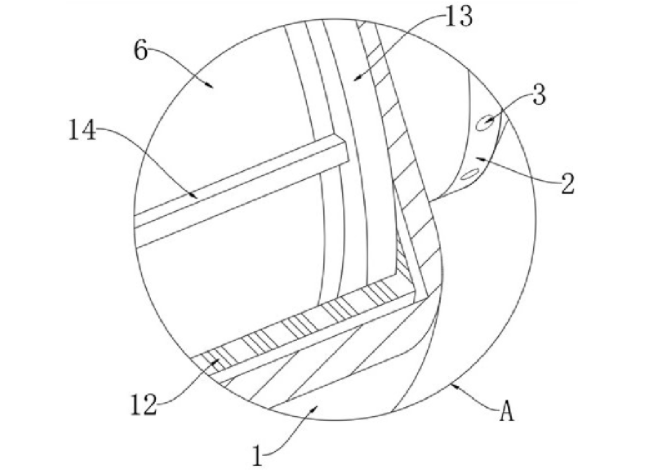
2.根据权利要求1所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,所述控制部(10)与两个载重部(9)的外周均对称安装有多个条形固定件(14),多个所述条形固定件(14)的两端均共同连接有环形固定件(13),多个所述条形固定件(14)与环形固定件(13)的外侧共同张紧有纤维约束层(12),所述纤维约束层(12)与机身(1)的内侧壁相贴合。
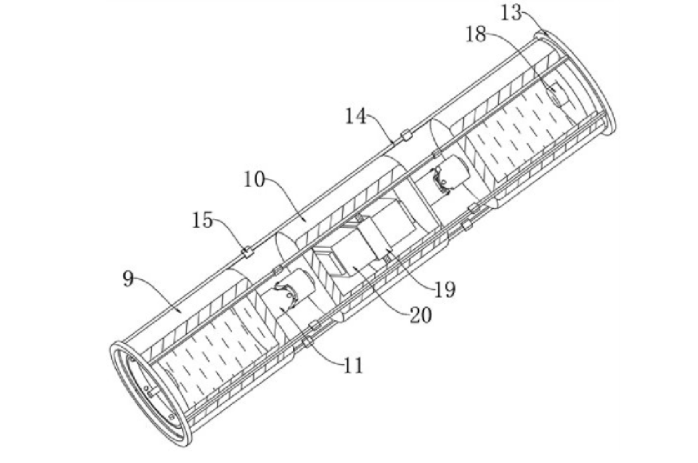
3.根据权利要求1所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,两个所述载重部(9)远离控制部(10)的一端均固定安装有密封法兰(17),两个所述载重部(9)内均安装有增压阀(18),两个所述增压阀(18)均密封连接有引流管(16),两根所述引流管(16)远离增压阀(18)的一端均通过密封法兰(17)延伸至载重部(9)的外部。
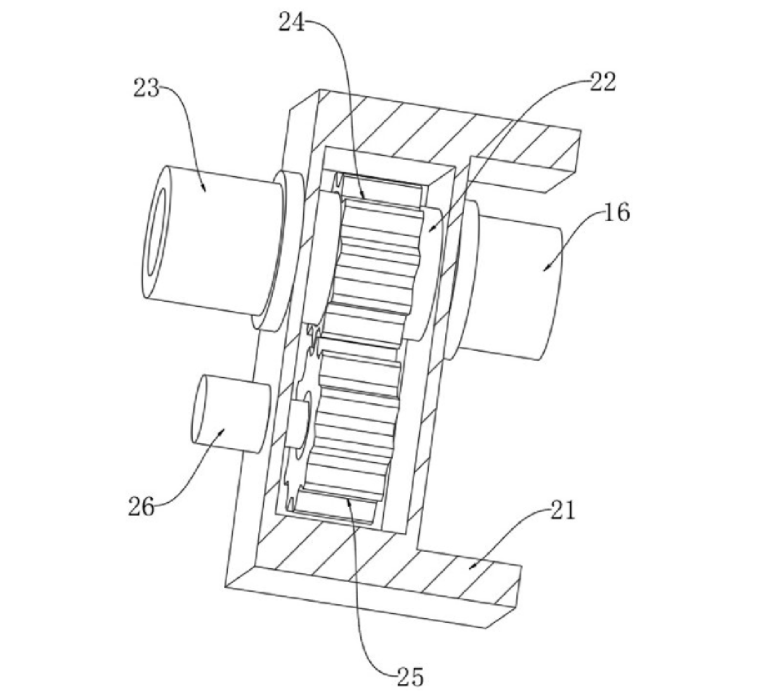
4.根据权利要求3所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,两个所述清洁机构均包括清洁头(2),两个所述清洁头(2)上均对称开设有多个喷射口(3),两个所述供液装置均包括固定安装在机身(1)上的承接架(21),两个所述承接架(21)内转动设置有中空转接杆(22),两根所述中空转接杆(22)的一端均与相应的引流管(16)密封连接,两根所述中空转接杆(22)的另一端均密封连接有分流管(23),且每根分流管(23)均与位置相对应的清洁头(2)相连通。
5.根据权利要求4所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,两个所述承接架(21)内均转动安装有齿轮(25),两根所述中空转接杆(22)上均过盈配合有齿环(24),且位于同一个承接架(21)内的齿环(24)与齿轮(25)相啮合,两个所述承接架(21)上还固定设有微型电机(26),且两个微型电机(26)的输出轴均与对应的齿轮(25)固定连接。
6.根据权利要求1所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,所述机身(1)的中部固定设置有防撞环(7),所述防撞环(7)的两侧壁上均对称安装有两个微型摄像机(4),所述控制部(10)内通过减震架(19)固定安装有控制器(20),且每个微型摄像机(4)均与控制器(20)电性连接。
7.根据权利要求1所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,每个所述行走机构还包括驱动轮(6)和驱动电机(29),每个所述驱动电机(29)均固定连接有安装套(5),位置相对应的安装套(5)与驱动电机(29)之间对称设置有多个弹性导柱(30),每个所述驱动电机(29)的输出轴均与对应的驱动轮(6)转动连接。
8.根据权利要求1所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,每个所述转向装置还包括支撑杆(31)和辅助轮(35),每根所述支撑杆(31)均与机身(1)固定连接,位置相对应的支撑杆(31)与滑动套(33)之间均固定连接有弹簧(32),每个所述辅助轮(35)均转动安装在对应滑杆(34)的下方。
9.根据权利要求2所述的某种基于视觉检测功能的设备内部清洁机器人,其特征在于,所述机身(1)的内侧壁与纤维约束层(12)的外侧壁之间形成有密封腔体,所述控制部(10)内固定安装有空气注射泵,所述空气注射泵的输出端延伸至密封腔体内。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!