本发明公开了用于自动质检操作的工业机器人及控制方法,用于自动质检操作的工业机器人包括两个支撑杆,支撑杆的两端均设置有支撑座,两个支撑杆之间的两端均设置有辊轴,两个辊轴的外侧套设有皮带,其中一个支撑杆一端的一侧设置有检测机构,另一个支撑杆中部的一侧设置有抓取机构,抓取机构的一侧设置有放置台,两个支撑杆的远离检测机构的一端设置有落物机构;支撑杆一端的顶部均设置有红外传感器,靠近检测机构一侧的辊轴一侧设置有电机一,且电机一底端设置有与支撑座固定连接的底板一。有益效果:本发明不仅实现了对注塑品的外观检测,还实现了对检测后合格品与不合格品的归类收集;进而提高了对注塑品的检测效率。
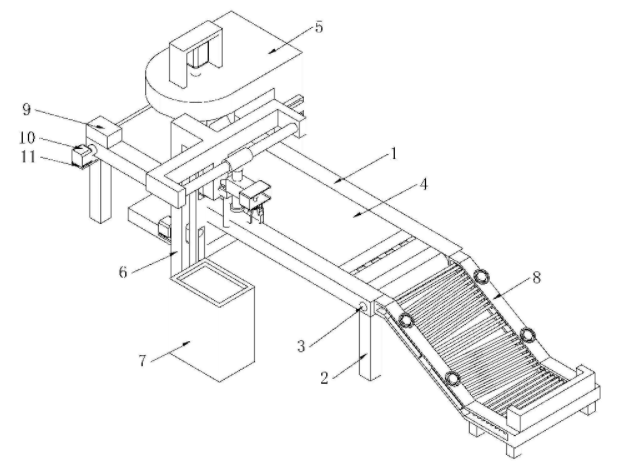
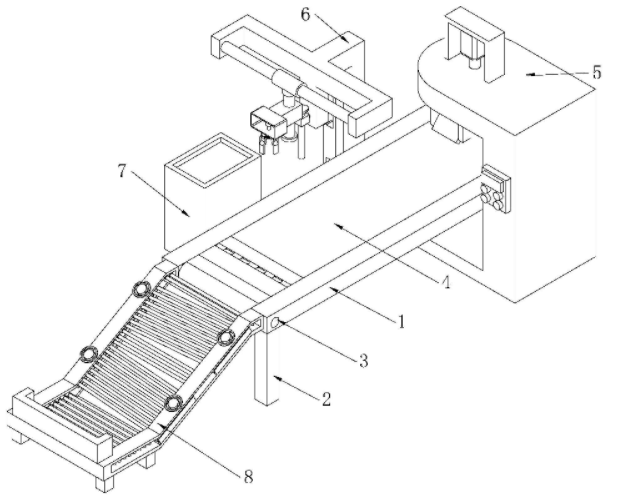
1.某种用于自动质检操作的工业机器人,包括两个支撑杆(1),其特征在于: 所述支撑杆(1)的两端均设置有支撑座(2),两个所述支撑杆(1)之间的两端均设置有辊轴(3),两个所述辊轴(3)的外侧套设有皮带(4),其中一个所述支撑杆(1)一端的一侧设置有检测机构(5),另一个所述支撑杆(1)中部的一侧设置有抓取机构(6),所述抓取机构(6)的一侧设置有放置台(7),两个所述支撑杆(1)的远离所述检测机构(5)的一端设置有落物机构(8); 所述支撑杆(1)一端的顶部均设置有红外传感器(9),靠近所述检测机构(5)一侧的所述辊轴(3)一侧设置有电机一(10),且所述电机一(10)底端设置有与所述支撑座(2)固定连接的底板一(11)。
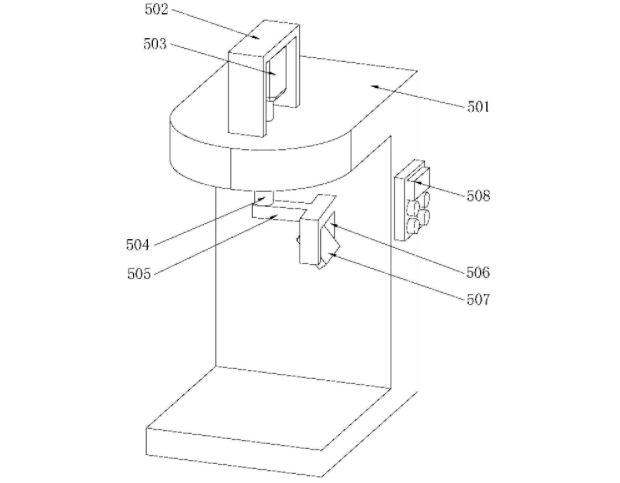
2.根据权利要求1所述的某种用于自动质检操作的工业机器人,其特征在于,所述检测机构(5)包括设置在其中一个所述支撑杆(1)一侧的支撑架(501),所述支撑架(501)的顶端设置有电机架(502),所述电机架(502)的内部设置有电机二(503),所述电机二(503)输出端的一端设置有贯穿于所述支撑架(501)顶端的转轴一(504),所述转轴一(504)的底端设置有安装座(505),所述安装座(505)的底部侧壁开设有开口(506),所述开口(506)的内部设置有扫描仪(507),所述支撑架(501)的中部侧壁设置有控制面板(508)。
3.根据权利要求1所述的某种用于自动质检操作的工业机器人,其特征在于,所述抓取机构(6)包括设置在另一个所述支撑杆(1)中部一侧的抓取支架(601),所述抓取支架(601)的顶端设置有横臂(602),所述横臂(602)的一侧开设有凹槽一(603),所述凹槽一(603)的内部侧壁设置有圆杆(604),所述圆杆(604)外侧套设有滑动环(605),所述滑动环(605)的底端设置有固定杆(606),所述固定杆(606)的外侧套设有滑动块(607),所述滑动块(607)的一端设置有抓取装置(608); 所述抓取支架(601)的一侧底端设置有转杆(609),且所述转杆(609)的底端与所述抓取支架(601)的底端通过轴承活动连接,所述转杆(609)的底部开设有滑槽一(610),所述滑槽一(610)的一侧设置有转动块一(611),所述抓取支架(601)的另一侧的底部设置有电机三(612),所述电机三(612)的底部设置有底板二(613),且所述底板二(613)与所述抓取支架(601)固定连接; 所述抓取支架(601)的顶部开设有滑槽二(614),所述滑槽二(614)的一侧设置有转动块二(615),所述转动块二(615)的一侧设置有竖臂(616),且所述竖臂(616)的顶端与所述横臂(602)的中部固定连接,所述竖臂(616)的一侧设置有转动块三(617),所述转动块三(617)的顶部设置有贯穿于所述转动块三(617)的限位杆(618),所述限位杆(618)的顶端设置有连接块一(619),且所述连接块一(619)的侧壁设置为L型结构,所述连接块一(619)的底端设置有弹簧(620),且所述弹簧(620)的底端与所述转动块三(617)固定连接,所述连接块一(619)的侧壁与所述滑动块(607)活动连接。
4.根据权利要求3所述的某种用于自动质检操作的工业机器人,其特征在于,所述转动块一(611)和转动块二(615)的结构相同,所述转动块一(611)的一侧的一端设置有凸块一(621),且所述凸块一(621)分别与所述电机三(612)的输出轴和转动块三(617)的侧壁固定连接,所述转动块一(611)的另一侧的另一端设置有凸块二(622),且所述凸块二(622)分别与滑槽一(610)和滑槽二(614)相配合。
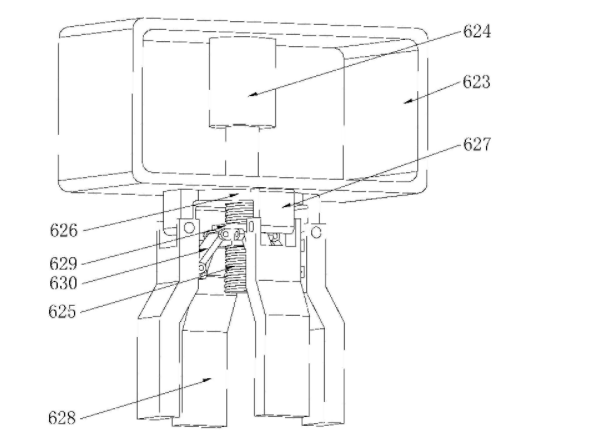
5.根据权利要求4所述的某种用于自动质检操作的工业机器人,其特征在于,所述抓取装置(608)包括连接座(623),且所述连接座(623)的侧壁与所述滑动块(607)固定连接,所述滑动块(607)的内部设置有电机四(624),所述滑动块(607)的底端中部设置有贯穿于所述滑动块(607)的螺纹杆(625),且所述螺纹杆(625)的顶端与所述电机四(624)的输出轴固定连接,所述螺纹杆(625)的外侧且位于所述滑动块(607)的底端设置有连接板(626),所述连接板(626)的侧壁设置有若干凸块三(627),所述凸块三(627)的底部设置有抓手(628);所述螺纹杆(625)的中部设置有螺母(629),所述螺母(629)的侧壁设置有若干连杆一(630),且所述连杆一(630)的一端与所述螺母(629)的侧壁活动连接,所述连杆一(630)的另一端与所述抓手(628)的侧壁活动连接。
6.根据权利要求1所述的某种用于自动质检操作的工业机器人,其特征在于,所述皮带(4)一端的顶部开设有接口(401),且所述接口(401)包括卡接板一(402)和位于所述卡接板一(402)一侧的卡接板二(403),所述卡接板一(402)的一侧壁设置有若干凸块四(404),且所述凸块四(404)之间设置有缝隙一(405),所述凸块四(404)的侧壁开设有通孔一(406);所述卡接板二(403)的一侧壁设置有若干与所述缝隙一(405)相配合的凸块五(407),且所述凸块五(407)之间设置有与所述凸块四(404)相配合的缝隙二(408),所述凸块五(407)的侧壁开设有通孔二(409),且所述通孔一(406)与所述通孔二(409)内设置有插销(410)。
7.根据权利要求6所述的用于自动质检操作的工业机器人,其特征在于,所述插销(410)包括两个相互对称的推板(411),所述推板(411)一侧壁的两端均设置有若干连杆二(412),且两个相互对称的所述连杆二(412)通过连接块二(413)连接,所述连接块二(413)的侧壁中部设置有螺纹杆(414),且所述连接块二(413)的侧壁中部开设有与所述螺纹杆(414)相配合的螺纹孔一,且所述螺纹杆(414)两端的螺纹方向相反。
8.根据权利要求1所述的用于自动质检操作的工业机器人,其特征在于,所述落物机构(8)包括与所述支撑杆(1)连接的落物支架(801),且所述落物支架(801)由有第一水平段(802)、第二倾斜段(803)以及第三水平段(804),所述落物支架(801),所述落物支架(801)两侧的侧壁均开设有通孔三(805),所述通孔三(805)内且位于所述第一水平段(802)、第三水平段(804)以及第二倾斜段(803)的中部均设置有旋转块一(806),且两侧的所述旋转块一(806)通过滑动杆一(807)连接; 其中,所述通孔三(805)内且位于所述第二倾斜段(803)的两端均设置有滑动板(808),且所述滑动板(808)的一侧开设有凹槽二(809),所述凹槽二(809)的侧壁之间设置有旋转块二(810),且所述旋转块二(810)之间通过滑动杆二(811)连接,所述第二倾斜段(803)的顶端设置有转动杆(812),所述第三水平段(804)远离所述第二倾斜段(803)的一端顶端设置有挡板(813)。
9.根据权利要求8所述的用于自动质检操作的工业机器人,其特征在于,所述转动杆(812)的顶部外侧设置有若干连接杆(814),所述连接杆(814)的外侧设置有转动环(815),所述转动杆(812)的底部侧壁开设有螺纹齿(816),且所述第二倾斜段(803)的顶部开设有与所述螺纹齿(816)相配合的螺纹孔二,且所述转动杆(812)的底端与所述滑动板(808)的顶端相配合。
10.用于自动质检操作的工业机器人的控制方法,用于权利要求1-9中任意一项所述的用于自动质检操作的工业机器人的控制,其特征在于,该方法包括以下步骤: 将待检测注塑品放入皮带(4)上; 检测机构(5)采用磁共振成像原理对待检测注塑品进行外观检测; 检测合格的注塑品通过皮带(4)传送至落物机构(8)中进行收集; 检测不合格的注塑品通过抓取机构(6)从皮带(4)上抓取至放置台(7)中进行收集。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!